
Machine Vision Technology
Optical path design technology

The optical path design technology is mainly aimed at measuring parts with special materials, complex features, and small dimensions. When the conventional light source image effect or structural space cannot meet the measurement requirements, it can deeply analyze and evaluate based on the characteristics of light and measurement requirements, carry out special optical path structure design, obtain high-quality image effects, and achieve precision measurement.
2D image stitching technology
2D image stitching technology is mainly aimed at product measurement in large field of view and high-precision scenes. By collecting multiple high-resolution images of different parts of the product, common feature points are extracted from each image, and an affine transformation matrix is constructed; Merge multiple images into a seamless, high-definition image through matrix operations. Unlike traditional region based stitching, this technology combines image preprocessing, registration, fusion, and boundary smoothing techniques to achieve high-precision stitching based on image features.
3D image spatial stitching technology
The 3D image spatial stitching technology is mainly aimed at measuring the dimensions of 3D space. Through 3D matrix transformation, multiple 3D point clouds are affined to the same spatial coordinate system to form a full angle 3D model. The company has designed a high-precision calibration board for multi face stitching images, which combines image preprocessing, feature point localization, affine, and image fusion technologies to achieve high-precision stitching.
2D and 3D coordinate system conversion technology
1. Simultaneously extracting features of the same object in both two-dimensional and three-dimensional space, using techniques such as rotation, scaling, and projection to obtain the matching relationship between two-dimensional and three-dimensional features, and thus calculating the transformation matrix between spatial and planar coordinate systems.
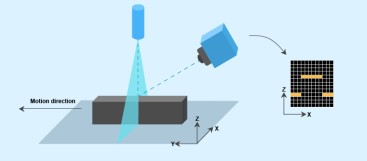
2. By combining line laser and planar camera, the technology of capturing corner features through laser 3D imaging and capturing peripheral features of the plane through planar camera is integrated. The conversion matrix between 3D and 2D coordinate systems is obtained through calibration, and the features in the 3D coordinate system are projected onto the 2D coordinate system.
