
マシンビジョンテクノロジー
光路設計技術

光路設計技術は主に特殊材料部品の計測を目的としています, 複雑な機能, そして小さな寸法. 従来の光源のイメージ効果や構造空間が測定要件を満たせない場合, 光の特性と測定要件に基づいて深く分析および評価できます, 特殊な光路構造設計を実施, 高品質の画像効果を得る, 精度の高い測定を実現します.
2D画像スティッチング技術
2D画像スティッチング技術は、主に広い視野と高精度なシーンでの製品測定を目的としています. 製品のさまざまな部分の複数の高解像度画像を収集することによって, 各画像から共通特徴点を抽出, そしてアフィン変換行列が構築されます; 複数の画像をシームレスに結合します, 行列演算による高精細画像. 従来の地域ベースのステッチとは異なります, この技術は画像の前処理を組み合わせたものです, 登録, 融合, 画像の特徴に基づいた高精度のステッチングを実現する境界スムージング技術.
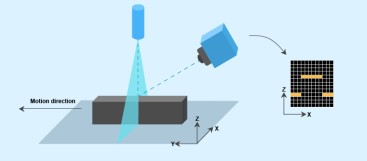
3D画像空間ステッチング技術
3D画像空間ステッチング技術は、主に3D空間の寸法を測定することを目的としています。. 3Dマトリックス変換による, 複数の 3D 点群が同じ空間座標系に関連付けられて、フルアングル 3D モデルを形成します. 同社は、多面スティッチング画像用の高精度キャリブレーションボードを設計しました。, 画像の前処理を組み合わせる, 特徴点の位置特定, アフィン, 高精度なステッチングを実現する画像融合技術.
2D・3D座標系変換技術
1. 2次元空間と3次元空間の両方で同じオブジェクトの特徴を同時に抽出, 回転などのテクニックを使用する, スケーリング, 2次元と3次元の特徴間の対応関係を取得するための投影, したがって、空間座標系と平面座標系の間の変換行列を計算します。.
2. ラインレーザーと平面カメラの組み合わせにより, レーザー3Dイメージングによるコーナー特徴の捕捉と、平面カメラによる平面の周辺特徴の捕捉技術を統合. 3D 座標系と 2D 座標系の間の変換行列はキャリブレーションによって取得されます。, 3D 座標系のフィーチャは 2D 座標系に投影されます。.
