
머신 비전 기술
광로 설계 기술

광로 설계 기술은 주로 특수 소재를 사용한 부품 측정을 목표로 합니다., 복잡한 기능, 작은 크기. 기존의 광원 이미지 효과나 구조적 공간이 측정 요구 사항을 충족할 수 없는 경우, 빛의 특성과 측정 요구 사항을 바탕으로 심층적으로 분석하고 평가할 수 있습니다., 특수 광로 구조 설계 수행, 고품질 이미지 효과 얻기, 정밀 측정 달성.
2D 이미지 스티칭 기술
2D 이미지 스티칭 기술은 주로 넓은 시야와 고정밀 장면에서의 제품 측정을 목표로 합니다.. 제품의 다양한 부분에 대한 다수의 고해상도 이미지를 수집하여, 각 이미지에서 공통적인 특징점을 추출합니다., 아핀 변환 행렬이 구성됩니다.; 여러 이미지를 하나의 매끄러운 이미지로 병합, 매트릭스 연산을 통한 고화질 이미지. 전통적인 지역 기반 스티칭과 달리, 이 기술은 이미지 전처리를 결합합니다., 등록, 퓨전, 이미지 특징을 기반으로 고정밀 스티칭을 달성하기 위한 경계 평활화 기술.
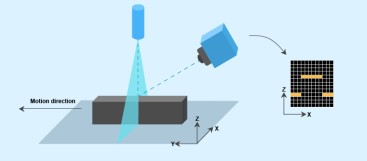
3D 이미지 공간 스티칭 기술
3D 이미지 공간 스티칭 기술은 주로 3D 공간의 크기를 측정하는 것을 목표로 합니다.. 3D 매트릭스 변환을 통해, 여러 3D 포인트 클라우드가 동일한 공간 좌표계에 연결되어 전체 각도 3D 모델을 형성합니다.. 이 회사는 다면 스티칭 이미지를 위한 고정밀 보정 보드를 설계했습니다., 이미지 전처리를 결합한 것입니다., 특징점 현지화, 아핀, 고정밀 스티칭을 실현하는 이미지 융합 기술.
2D 및 3차원 좌표계 변환 기술
1. 2차원 공간과 3차원 공간에서 동일 객체의 특징을 동시에 추출, 회전과 같은 기술을 사용하여, 스케일링, 2차원과 3차원 특징 사이의 일치 관계를 얻기 위한 투영, 따라서 공간 좌표계와 평면 좌표계 간의 변환 행렬을 계산합니다..
2. 라인 레이저와 평면 카메라를 결합하여, 레이저 3D 이미징을 통해 모서리 부분을 캡처하는 기술과 평면 카메라를 통해 평면의 주변 부분을 캡처하는 기술이 융합되었습니다.. 3D 좌표계와 2D 좌표계 간의 변환 행렬은 교정을 통해 얻습니다., 3D 좌표계의 피처는 2D 좌표계에 투영됩니다..
